Для построения коммутатора можно применить принцип пересекающихся шин данных, использующихся в регулярных матричных архитектурах. Пример такого матричного коммутатора из шин представлен на рис. 10.2. Вход и выход этой системы реализуется с помощью шин с временным разделением [10.4, 10.5]. Каждая точка коммутации определяет индивидуальную входную и выходную шины. В отличие от обычного пространственного коммутатора точка коммутации в этой системе выполняет значительно более интеллектуальные функции.
Основные функции точки коммутации ориентированы на информационный поток входных шин. В частности, точкой коммутации осуществляется проверка заголовка ячейки, а именно определяется, будет ли маршрутизирована ячейка на исходящую шину, соответствующую точке коммутации. Работа точки коммутации зависит от принципа функционирования исходящей шины. Наиболее распространенными являются два принципа функ-
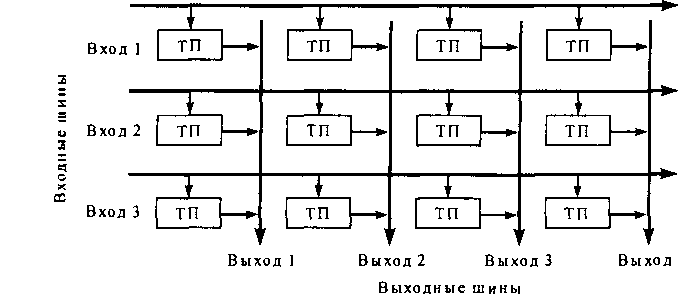
Рис. 10.2. Матрица из шин с временном разделением: ТП - точка пересечения (процессор, буфер, точка коммутации и т. д.)
ционирования, основанные соответственно на последовательном и параллельном доступах.
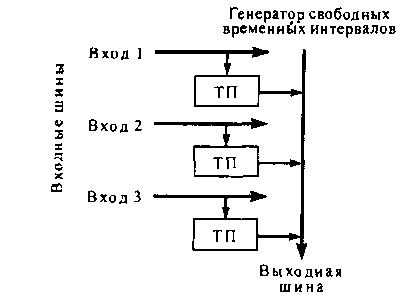
Последовательный доступ (случай шины). Выходная шина, работающая как обычная шина с временном разделением, показана на рис. 10.3. В этом случае точка коммутации будет ожидать пустой канал и, обнаружив его, передаст ячейку в выходную шину. При таком способе функционирования должен быть организован приоритет доступа входов. Этот приоритет организуется следующим образом: точка коммутации, ближайшая к генератору временнь'гх каналов, будет иметь наивысший приоритет и поэтому имеет монопольный доступ к шине. Уровень приоритета может меняться от «точки к точке».
Параллельный доступ (случай с использованием мультиплексора).
Структурная схема выходной шины, функционирующей с использованием мультиплексора, показана на рис. 10.4. В этом случае необходимо центральное управление для каждого выхода. Управляющее устройство решает, какая из точек коммутации может пропустить следующую ячейку на выходную шину. В частности, простейшей процедурой управления может быть процедура циклического обслуживания. При параллельном доступе возможно введение буфера на выходе. Этот буфер может быть общим для всех точек коммутации,
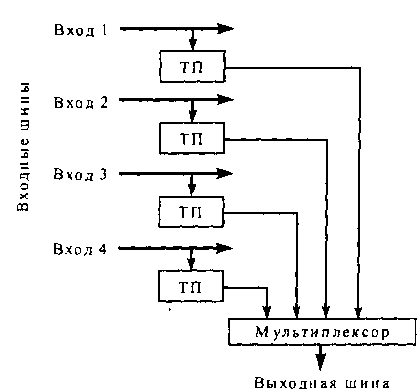
Выходи ая шина і с. 10.4. Структурная схема шины с ис-щьзованием мультиплексора относящихся к определенной исходящей шине и он позволит лучше использовать общую бу- з ферную емкость шины. Однако такой буфер сохраняет необхо- « димость использования накопи- = телей в каждой точке пересече- ° ния. Накопитель в точках пересечения задерживает ячейки до тех пор, пока они не будут считаны в мультиплексор.
Требования ограничения доступности из-за технологических причин при проектировании шинного коммутатора от- ^ сутствуют. Однако имеется огпо раничение, связанное с проблемой синхронизации потока ячеек в области гигабитных скоростей, а также ограничение на размер и время доступа к памяти. В области высоких скоростей передачи информации (до нескольких Гбит/с) есть возможность организации большого числа виртуальных каналов на один вход. При таких скоростях требуется большой объем памяти для каждой точки коммутации, необходимый для анализа заголовков. Анализ большой памяти в конечном счете может привести к ограничению пропускной способности коммутатора.
Рассмотрим пример. Пусть имеется коммутатор емкостью 16 х 16. Если принять, что скорость передачи по входной шине составляет 155,520 Мбит/с, адресное поле заголовка составляет 2 октета, а длина ячейки 34 октета, то память, необходимая для хранения адресных таблиц, составит 65 кбайт, а время доступа - 1,7 мкс.
Сложность матрицы из шии с временном разделением. Так как число точек коммутации в матрице, представленной на рис. 10.2, увеличивается пропорционально квадрату ее емкости и поскольку сама точка коммутации является в определенном смысле интеллектуальной, то представляется мало реалистичным проектирование коммутатора с большим числом входов и выходов. Кроме того, дальнейшее усложнение точки коммутации за счет расширения ее функции будет вызывать ограничение скорости передачи по шинам.
Большим преимуществом матрицы, показанной на рис. 10.2, является использование уплотненных шин, что позволяет обеспечить гибкость в отношении скорости передачи битов и размера заголовков по различным входам и выходам. Это объясняется возможностью организации различного числа виртуальных каналов. Кроме того, обработка информации по этим шинам может быть осуществлена полностью независимо. В таких системах имеется возможность изменять некоторые части коммутатора, не затрагивая остальные его элементы.
О возможности расширения матрицы, представленной на рис. 10.2, можно судить по табл. 10.1.
Таблица 10.1
|
Реализация |
Добавление |
|||
|
одного входа |
одного выхода |
блока входов |
блока выходов |
|
|
Мультиплексорная |
Т* |
Л** |
Т |
Л |
|
Шинная |
Л |
Л |
Л |
Л |
*Т - могут возникнуть трудности. **Л - легко.
Рассмотрим кратко, чем обусловлены задержки рассматриваемой системы. Задержка ячейки, проходящей через матрицу, зависит от следующих факторов:
- нагрузки;
- протокола доступа;
- скорости передачи;
- статистической природы ячеек.
О требовании к синхронизации в системе можно судить по табл. 10.2.
Таблица 10.2
|
Условие коммутации |
Синхронизация |
|
|
по битам |
по ячейкам |
|
|
Входная шина <-» входная шина |
М* |
М |
|
Входная шина <-» точка коммутации г |
Т |
Т |
|
Точка коммутации <-» выходная шина |
Т |
Т |
|
Выходная шина <-» выходная шина |
НТ |
НТ |
*М - может потребоваться в зависимости от условий. **Т - требуется; ***НТ - не требуется.
Из этой таблицы следует, что всегда необходима синхронизация точки коммутации со входом и выходом, причем эта синхронизация должна быть как по битам, так и по ячейкам.
На рис. 10.5 показана зависимость вероятности потери ячейки от емкости буфера.
⇐Принципы построения и анализ характеристик коммутационных сред для режима быстрой коммутации пакетов - шина с временным разделением | Мультисервисные телекоммуникационные сети | Коммутационная система с общей памятью⇒