Пусть целевая функция и ограничения нелинейные. Каждый вариант плана характеризуется X, , Х2, z(x,Х2). Поиск оптимального решения может быть таким.
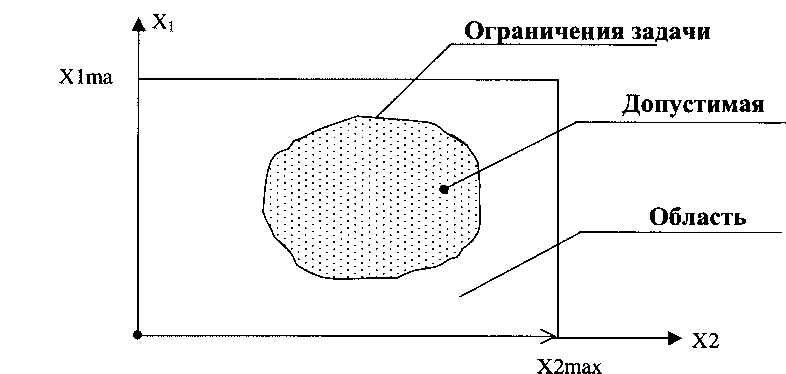
Сначала из экономических соображений выделяется область, в которой будут проводиться испытания. На рис. 12 показаны ограничения исходной задачи и область испытаний при случайном поиске.

Алгоритм реализуется по шагам:
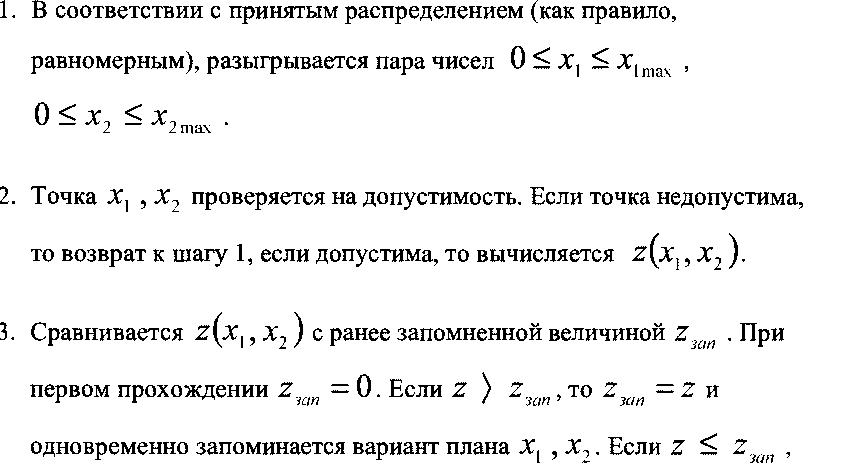
первом прохождении 2зап= 0. Если 7 ) 2зап, то 2зап= г к одновременно запоминается вариант плана X, , Х2. Если г < 2зап, то прежний запомненный вариант сохраняется.
4. Выполняется анализ в соответствии с принятым правилом завершения поиска. Если поиск не завершён, то - переход к шагу 1. Если поиск завершён, то - выход из расчёта.
Правила завершения могут быть разнообразными. Приведём в качестве примера два правила:
1. Выполнено заданное число итераций.
2. На заданном числе последних итераций улучшения целевой функции были меньше заданного числа.
⇐Линейное программирование | Система управления предприятием типа ERP | Метод слуайного поиска с локальной оптимизацией⇒