Energy loss - параметр, соответствующий потерям энергии при движении в реальном мире, например, потерям от трения.
Перейдем на закладку Details.
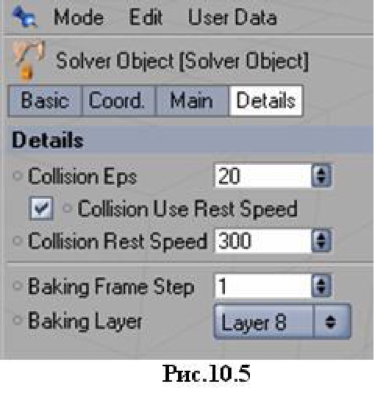
Collision Eps - параметр, задающий расстояние от поверхности твердых тел, где находится граница, препятствующая взаимопроникновению тел при их столкновении.
Collision Use Red Speed, Collision Red Speed - параметр, задающий глубину взаимопроникновения при перемещении одного предмета по поверхности другого.
Baking Frame Step - параметр, задающий количество ключевых кадров для построения одного кадра анимации. Задайте 1, но если планируете в дальнейшем редактировать анимацию, то надо задать число ключевых кадров большее, чем единица.
Baking Layer - задает номер слоя. По умолчанию - 8 слоев.
10.3. Динамика упругих тел (Rigid body Dynamic)
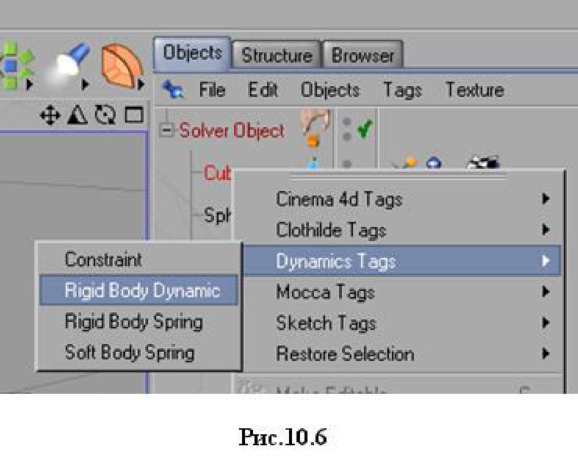
Упругие тела при соударении не меняют своей формы. Чтобы задать упругое тело, надо щелкнуть правой кнопкой мыши по значку объекта и в появившемся контекстном меню выбрать Dynamics Tag -> Rigid Body Dynamic (рис. 10.6).
Рядом со значком объекта в окне менеджера объектов появится значок тэга Rigid Body Dynamic (рис.
10.7).
На рис. 10.8 приведено окно менеджера атрибутов для тэга Rigid Body Dynamic.
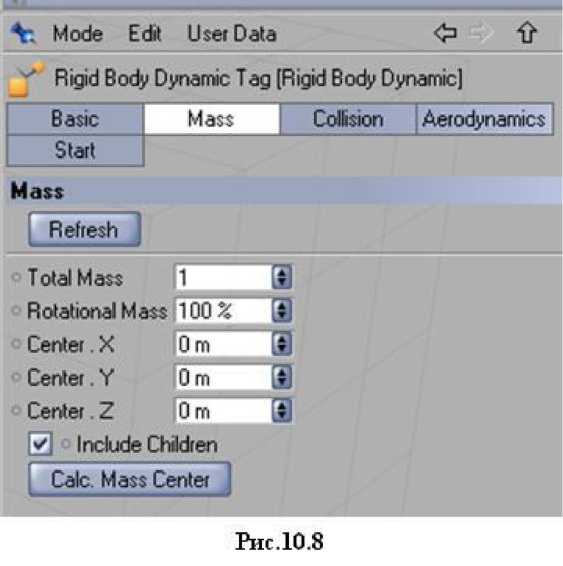
Рассмотрим содержание закладки Mass.
Total mass - общая масса объекта, значение которой влияет на эффект от приложения силовых полей. При массе 0 воздействие силовых полей отсутствует.
Rotational mass - масса вращения, выражается в процентах от общей массы. Чем выше масса, тем большую силу надо приложить для изменения направления вращения.
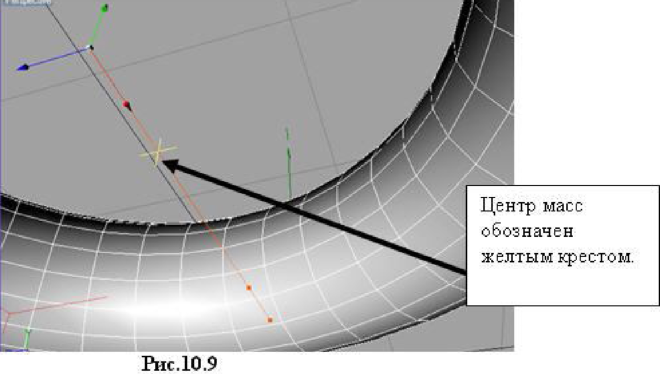
Center X, Center Y, Center Z - позволяют перемещать центр масс объекта. Координаты центра масс объекта обозначаются желтым крестом (рис. 10.9) и по умолчанию совпадают с геометрическим центром объекта.
Include Children - флажок, позволяющий переносить параметры родительского объекта на дочерние объекты.
Calc Mass Center - кнопка возвращает координаты центра масс в состояние по умолчанию.
Рассмотрим содержание закладки Collision (Столкновение) (рис. 10.10).
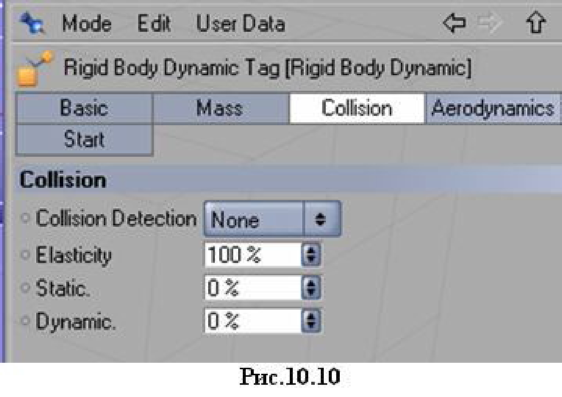
Collision Detection - позволяет задать характер соударения тел (рис. 10.11).
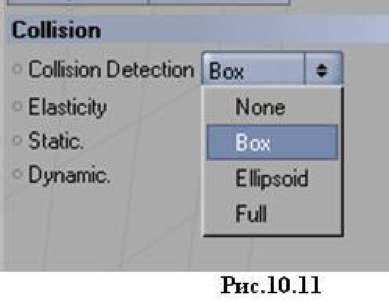
None - при соударении тела, обладающие для этого достаточной энергией, проникнут (войдут) друг в друга. Если выбрать любой другой пункт из списка, то смоделируется упругий удар (тела отлетят в стороны без деформаций).
Box - этот вариант обеспечит наибольшую скорость расчета, но при низкой точности. Объект заменяется параллелепипедом и рассчитывается столкновение параллелепипедов. Расстояние, на которое разлетаются тела, может существенно отличаться от результата, полученного при выборе других пунктов списка, обеспечивающих расчет по моделям, более приближенным к реальным формам соударяющихся тел.
Ellipsoid - объект заменяется эллипсоидом вращения и рассчитывается столкновение эллипсоидов. Метод более точен, чем предыдущее приближение.
Full - при соударения расчет ведется для каждого полигона с учетом реальной формы тела. Метод наиболее точный, но требует максимального времени на выполнение.
Elasticity - задает в процентах количество энергии, сохраненное телом после соударения. При значении меньше 100% тела после соударения остаются неподвижными, при равенстве и превышении 100% - тела отскакивают на тем большее расстояние, чем больше значение параметра превышает 100%.