Перейдем на вкладку Distance, параметры которой позволяют изменять размеры, цвет и яркость частиц
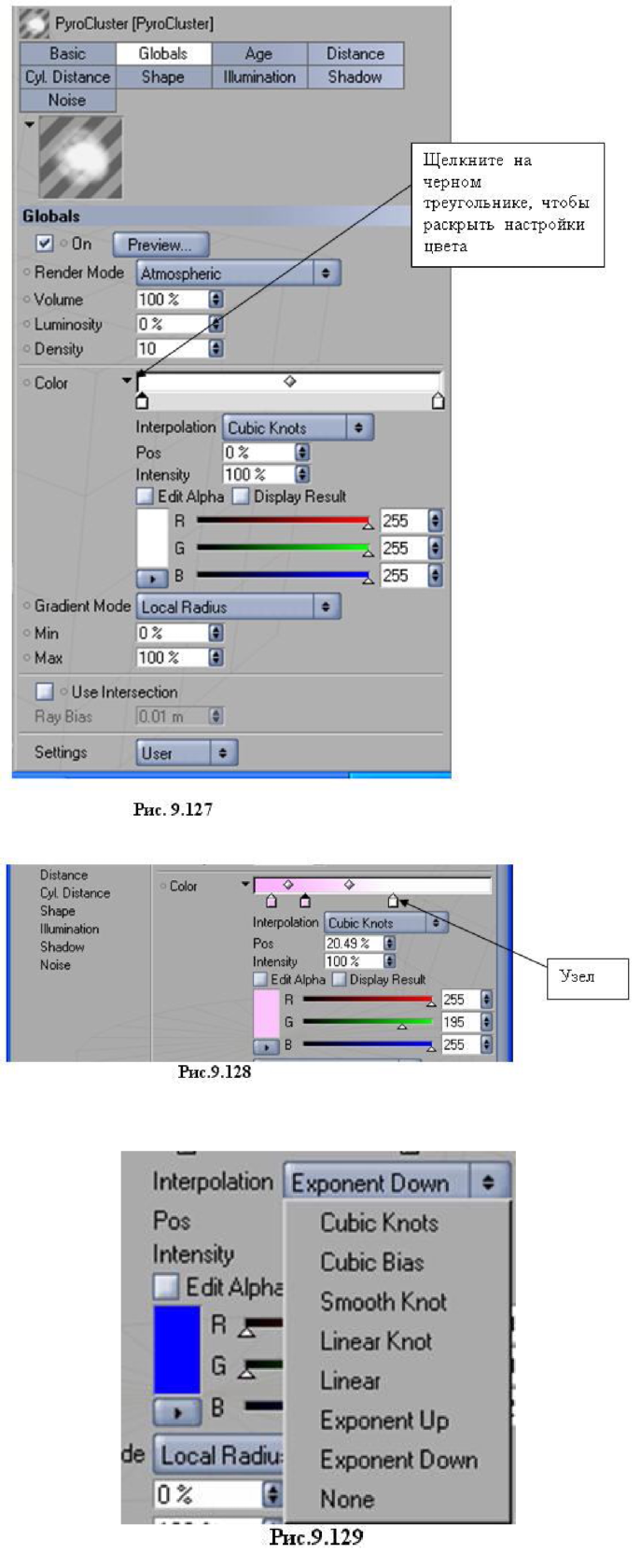
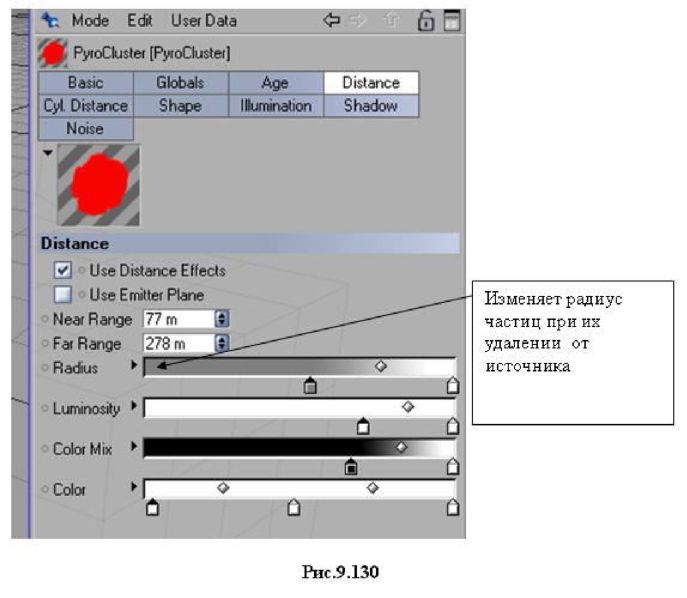
в зависимости от удаленности от источника частиц (эмиттера) (рис. 9.130, 9.131).
Глава 10. Модуль Dynamics
10.1. Классификация силовых полей В модуле Dynamics имеется возможность моделирования трех сил: гравитации (Gravity), трения (Drag) и ветра (Wind). Действие сил может либо распространяться на объекты всей сцены, либо быть ограничено геометрической формой (кубом, тором, конусом), за пределами которой силы не действуют. Действие сил на объект проявляется в ускорении или замедлении движения объекта вплоть до его полной остановки. Поля действует только на объекты, масса которых отлична от нуля. Поэтому, чтобы отключить действие поля на объект, надо задать его массу, равную 0.
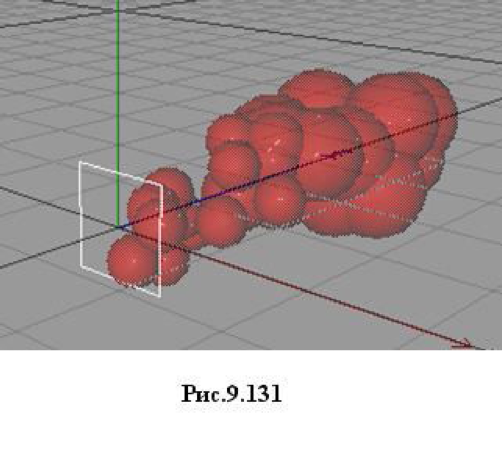
Выбор поля производится в меню Plugins -> Dynamics (рис. 10.1).
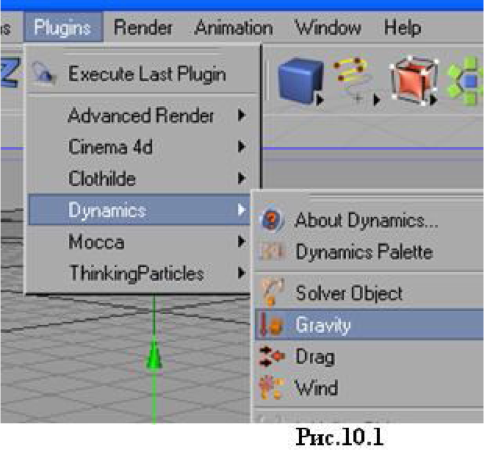
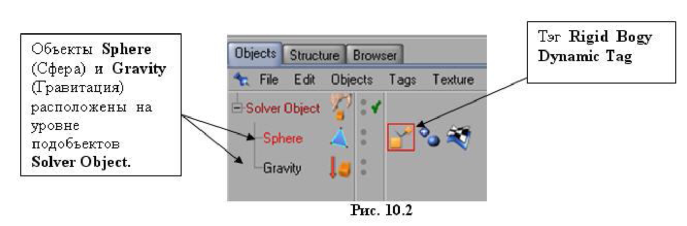
Как видно из меню, кроме значков силовых полей в группе имеется еще значок объекта Solver Object. Это объект, с создания которого надо начинать работу с полями. Именно в нем происходят все необходимые вычисления, связанные с воздействием полей. Значки силовых полей и объектов, к которым применены поля, следует располагать на дочерний уровень по отношению к уровню Solver Object. Например, если к примитиву Sphere требуется приложить силы гравитационного поля, то расположить объекты (в окне менеджера объектов) следует так, как показано на рис.
10.2.
Следует отметить, что, кроме правильного расположения объектов, для Sphere (Сфера) следует создать тэг, например, Rigid Bogy Dynamic Tag, а также сделать объект Sphere редактируемым.
10.2. Объект Solver Object
Как было показано выше, объект Solver Object работает в качестве контейнера для других объектов и силовых полей. К объекту, не помещенному на дочерний уровень по отношению к объекту Solver Object, действие силовых полей не применимо.
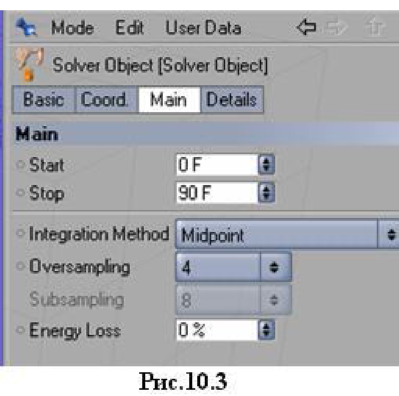
Рассмотрим настройки объекта Solver Object (рис. 10.3). Содержимое закладок Basic и Coord очевидно. Начнем с закладки Main.
Start Stop - задают соответственно номера кадров начала и конца анимации.
Integration Method - задает численный метод решения дифференциальных уравнений, описывающих движение объектов в анимируемой сцене (рис. 10.4).
Eule (метод Эйлера) - эффективен для расчета столкновений упругих тел.
Midpoint - дает высокую скорость расчета при низкой точности.
Runge-Kutta (метод Рунге-Кутта) - точность примерно в 10 раз превышает точность метода Midpoint, но быстродействие приблизительно в 4 раза ниже.
Adaptive - наиболее точный и наименее быстрый метод.
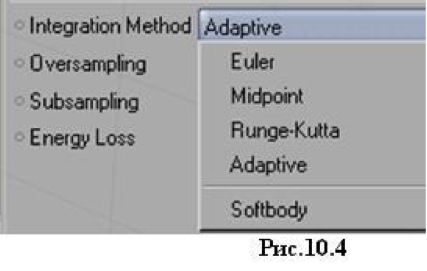
Softbody - применяется для расчета кинематики мягких тел.
Oversampling - параметр, задающий количество отрезков, на которые разбивается временной интервал (между двумя кадрами) в численных методах решения дифференциальных уравнений. Для методов Midpoint и Runge-Kutta чем больше отрезков, тем выше точность решения. Для метода Adaptive параметр Oversampling задает минимальное количество отрезков (максимальное - задается параметром Subsampling).
Subsampling - параметр, значение которого задается только для метода Adaptive. Максимальное количество отрезков вычисляется умножением значения параметра Oversampling на значение параметра Subsampling. Общее количество отрезков будет меняться от кадра к кадру в зависимости от характера движения объекта. Например, в окрестности точки смены объектом направления движения интервал будет дробиться на максимальное количество отрезков, а при прямолинейном равномерном движении отрезков будет минимальное количество. Такой подход делает метод Adaptive наиболее точным.