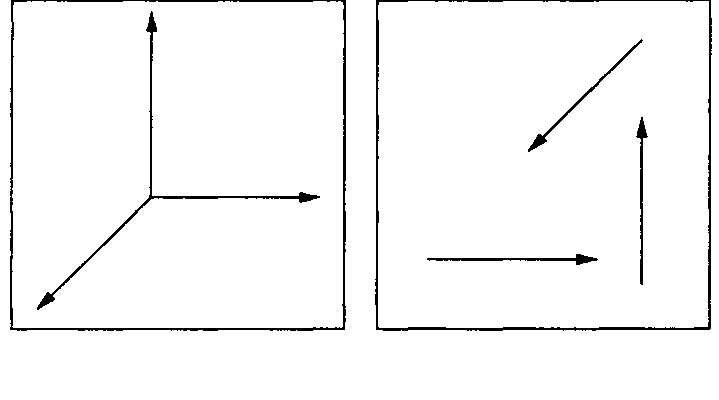
поясняет рис. 4.18. Систему координат, представленную на рис. 4.18,а, образуют три вектора, причем все они исходят из одной и той же точки. Именно так мы и привыкли рисовать систему координат на бумаге. Эти три вектора можно использовать в качестве базиса для представления любого вектора в трехмерном пространстве. Однако выше уже отмечалось, что векторы как геометрические объекты не имеют точки приложения, а характеризуются только направлением и модулем. Следовательно, векторы на рис. 4.18,а,б эквивалентны. Большинство студентов весьма смущает базис, представленный на правой картинке, хотя с точки зрения чистой математики обе картинки имеют один и тот же смысл. Но у нас по-прежнему остается нерешенной проблема представления точки - геометрического объекта, который имеет фиксированное положение в пространстве.
Рис. 4.17. Разложение вектора по векторам базиса а) б)
Рис. 4.18. Системы координат: а - векторы, исходящие из одной и той же позиции; 6 - свободные векторы
Поскольку аффинное пространство включает и точки, то, как только мы зафиксируем определенную точку отсчета - начало координат, в нем можно будет однозначно предста-
Объекты и геометрические преобразования
вить любую точку. Общепринято изображать оси системы координат как исходящие из точки начала координат (см. рис. 4.18,а). Это имеет смысл в аффинном пространстве, в котором можно представлять как векторы, так и точки. Однако такое представление требует использования точки отсчета и векторов базиса, которые в совокупности называются фреймом [frame). Если не требовать особой строгости в формулировках, то можно считать, что базисные векторы исходят из некоторой точки Р0. В конкретном фрейме любой вектор можно однозначно записать в виде и> = a,v, +a,v2 +CC3V3, точно так же, как и в векторном пространстве. Кроме того, для любой точки можно написать соотношение
P = P0+r\ivx + TI2V2 + rbv3.Таким образом, любой вектор описывается в фрейме тремя скалярами, а описание точки включает три скаляра и данные о точке отсчета. Как будет показано в разделе 4.3.3, отказ от знакомого со школьной скамьи понятия системы координат в пользу менее привычного понятия фрейма позволит избежать трудностей при работе с векторами, которые имеют направление и величину, но не имеют фиксированной точки приложения. Кроме того, концепция фрейма позволяет представлять точки и векторы таким образом, что для манипуляций с ними можно использовать единый математический аппарат матричной алгебры, сохраняя, тем не менее, различие между этими двумя типами геометрических объектов.