Динамика сплошных сред, которая не может быть адекватно описана с помощью систем частиц - один из наиболее сложных и ресурсоемких типов динамики. Для моделирования поведения жидкостей и газов приходится решать системы уравнений в частных производных, которые требуют значительных вычислительных мощностей, поэтому интерактивная работа с анимацией в этом случае редко представляется возможной. Этот вид динамики реализован в MAYA на основе модуля MAYA Fluids.
Движение тканей также представляет собой типичную задачу динамики. В силу необходимости рассчитывать огромное количество траекторий для точек, контролирующих поверхность, эта задача также требует значительной мощности процессора и для интерактивного воспроизведения нуждается, как правило, в предварительном просчете. Модуль MAYA Cloth решает это задачу в максимально «текстильных» терминах, оперируя такими понятиями как «швы», «вытачки», «пуговицы» и др. Есть также альтернативная система для работы с тканями в MAYA. Это плагин Syflex - коммерчески оформленная технология анимации тканей, использовавшаяся, например, при производстве фильма Final Fantasy (www.syflex.biz).
А как же динамика мягких тел (soft body dynamics), о которой все столько слышали? Это всего лишь часть динамики систем частиц. Остроумная и эффективная идея заключается в том, что частицы могут полностью контролировать движение контрольных вершин поверхности или кривой. Иначе говоря, точки контрольные точки поверхности намертво «прилипают» к частицам и двигаются вместе с ними по законам динамики, при этом деформируя поверхность. Главный плюс динамики мягких тел (хотя удачнее было бы называть ее динамикой деформируемых тел)
- ее интерактивность. Благодаря этому эта технология часто служит эффективной альтернативой системам анимации тканей.
Динамика твердых тел Начнем со слепого примера. То есть сделаем некоторую последовательность действий без комментариев, вслепую, а затем поговорим о принципах динамики твердых тел, на примере только что произведенных, лихорадочных действий.
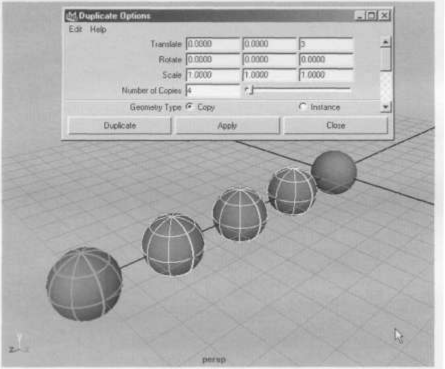
Колбасинг Создайте NURBS-сферу.
Размножьте ее. Зайдите в Option Box для Edit=>Duplicate и установите TranslateZ=3; Number of Copies=4.
Нажмите Duplicate.
Это создаст пять сфер, распределенных вдоль оси Z.
Выберите все сферы.
Нажмите F4. Выполните Fields=>Gravity. Нажмите Play.
Все сферы стремительно падают вниз. Попробуем прибить первую к земле гвоздем. (Не забывайте нажимать Stop перед любыми очередными действиями.)
Выберите первую сферу.
Откройте Option Box для Soft/Rigid Bodies=>Create Nail Constraint.
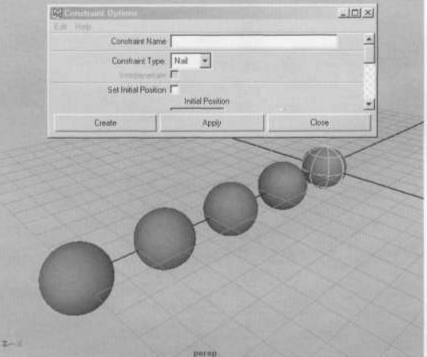
Установите Constraint Type=Nail.
Нажмите Apply и не закрывайте Constrain Option Box.
Нажмите Play.
Первая сфера осталась “прибита” гвоздем и никуда не падает.
Теперь свяжем первую и вторую сферы.
Выберите первую и вторую сферы (только их, не зацепив созданное поле гравитации или гвоздь (их проще выбирать их в Outliner).
Установите в Option Box новый тип «закрепления»: Constraint Type=Pin.
Нажмите Apply.
Нажмите Play.
Повторите это для остальных пар сфер (2 и 3, 3 и 4, 4 и 5).
Закройте окно Constrain Option Box.