Повторяйте эту процедуру до тех тор, пока не будут созданы пять нуль-объектов. Удостоверьтесь в том, что порядковые номера назначены последовательно от первой до последней точки.
Установив флажок Twist для каждого манипулятора, вращение соответствующего нуль-объекта можно передать суставам.
Установка флажка Offset создает ю-большой просвет между манипуляторами и точками сплайна.
Если сплайн - это фигура Безье, то смещение можно также изменить с го-мощью параметра Depth (Глубина). В таком случае манипулятор располагается в конце касательной на сплайновой точке и может влиять на направленность кривой более точно.
Установка ног Для создания соотношений инверсной кинематики в ногах мы воспользуемся другим подходом. Удерживая нажатой клавишу <Ctrl>, выделите в окне Objects ваг суставы одной ноги, которые нуждаются во внешних управляющих объектах.
Продолжая удерживать в нажатом состоянии клавишу <Ctrl>, выберите команду меню Character • IK Chain. В результате выделенным суставам будут автоматически назначены дескрипторы IK, и управляющие объекты.
Для дескриптора IK самого верхнего сустава в этой цепочке активизируйте дополнительный полюсный вектор.
Положение этого объекта управляет плоскостью движения целой ноги, что автоматически позволяет избежать, например, бокового изгиба в колене.
Для создания дополнительного нуль-объекта полюсного вектора воспользуйтесь кнопкой Add Pole в окне с параметрами дескриптора IK (рис. 4.71).
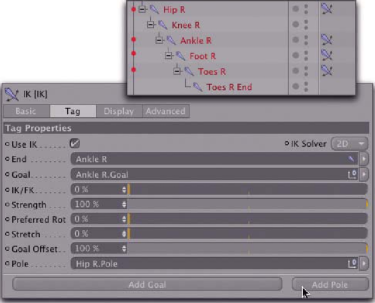
Рис. 4.71. Дескриптор IK
В качестве альтернативы, все виды управляющих объектов можно создать вручную, а затем перетащить с помощью мыши из окна Objects в соответствующе поля дескриптора IK. Таким образом, в качестве нуль-объектов в случае необходимости могут выступать и другие объекты.
Проделайте ту же процедуру с другой ногой, после чего перетащите мышью оба полюсных вектора дальше от фигуры, разместив их на уровне бедер персонажа (рис. 4.72).
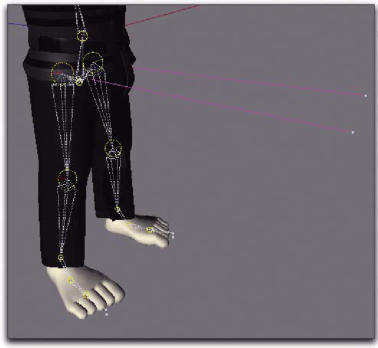
Рис. 4.72. Размещение полюсных векторов Установка рук Рукам назначить дескрипторы IK еще проще, поскольку в данном случае полюсные векторы не нужны. Удерживая нажатой клавишу <Ctrl>, выделите только первые три сустава руки и опять воспользуйтесь функцией IK Chain.
Это создаст новые дескрипторы IK для первых двух суставов рук (рис. 4.73).
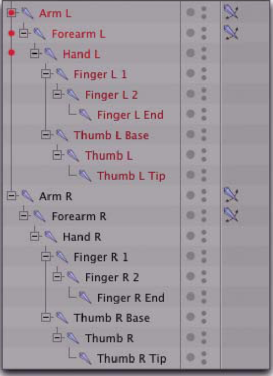
Рис. 4.73. Дескрипторы IK рук Исходное выделение объектов Joint отмечено на рис. 4.73 точками. Оно определяет цепочки инверсной кинематики. Теперь нам надо отсортировать внешние объекты, чтобы быстрее достичь требуемого положения персонажа, но об этом мы поговорим чуть позже. Для начала же познакомимся с понятием морфинга.
Морфинг Этот термин обычно означает изменение формы путем перемещения вершин объекта. В результате, как правило, невозможно создать морфинг для двух объектов с различным количеством вершин.
По этой причине модуль МОССА предоставляет деформатор Shrinkwrap, хотя для анимации персонажей он применяется нечасто.
Таким образом, мы воспользуемся традиционным морфингом. Разнообразные инструменты для этого также присутствуют в модуле МОССА. Рассмотрим некоторые из них подробнее.