Для первого поля сила гравитации направлена перпендикулярно вниз, что совпадает с отрицательным направлением по оси 0Y системы координат, поэтому в настройках (рис. 10.71) указано отрицательное
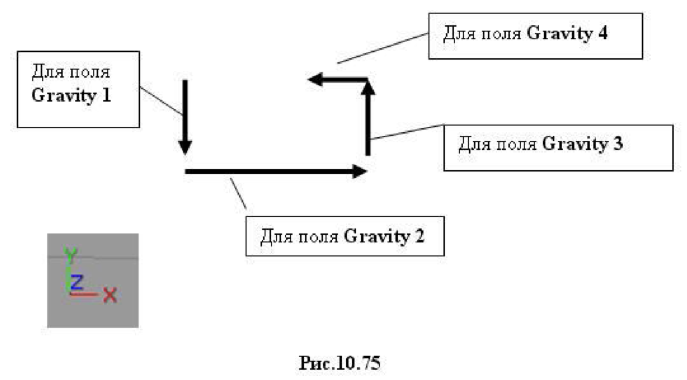
значение координаты вектора силы Direction Y -0,957 (можно задать -1). Для второго поля Gravity 2 вектор должен быть направлен в положительную сторону оси 0Х, поэтому задано Direction X = 1,055 (можно задать 1). Для третьего поля Gravity 3 направление положительное по оси 0Y и Direction Y = 1,001 (можно 1). Для четвертого поля - отрицательное направление по оси 0Х и Direction X = 1,001 (можно 1).
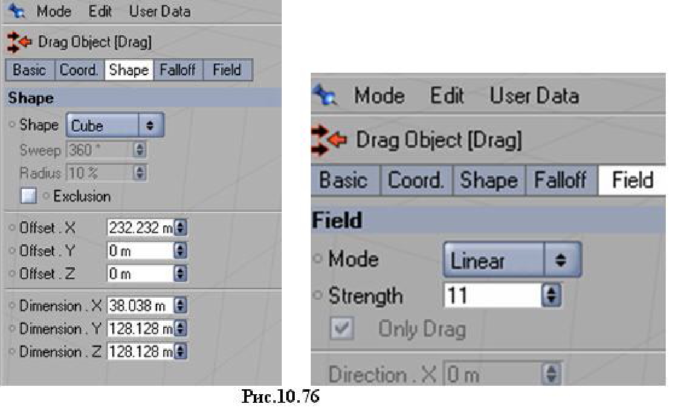
Обратите внимание на значения сил (параметр Strength). От поля к полю, сила нарастает, что нужно для изменения направления траектории движения сферы. На выходе из четвертого поля сфера имеет слишком большую скорость и пролетает сквозь параллелепипед первого поля. Чтобы притормозить движение сферы на этом участке, на выходе из четвертого поля располагается параллелепипед поля сил трения Drag (рис. 10.70). Ниже приведены характеристики поля Drag.
семяныч.ру официальный магазин.
Параметры для сферы приведены ниже (рис. 10.77).

Запустите просмотр анимации. При количестве кадров 90 и скорости 24 кадра/с сфера успеет сделать два полных оборота против часовой стрелки по заданному контру.
10.7. Соединение упругих тел пружинами (Rigid Body Spring)
Речь идет о моделировании поведения пружины, когда к ее концам приложены силы, растягивающие пружину в противоположных направлениях. В зависимости от величины сил и параметров самой пружины возможны три варианта: пружина после снятия сил возвращается в исходное состояние, пружина не возвращается в исходное состояние (произошла пластическая деформация) и пружина разрывается. Создать пружину можно двумя способами: с помощью диалогового окна Rigid Springs и с помощью инструмента RBS Draw Tool (сокращение RBS расшифровывается как Rigid Body Spring). Пружина может прикрепляться к любой точке объекта, и к одному объекту может быть прикреплено более одной пружины.
Задача Смоделировать следующую сцену: одна сфера неподвижна, к ней на пружине прикреплена вторая сфера, которая падает под действием сил гравитации и попадает в воздушный поток, направленный горизонтально. Этот поток отбрасывает сферу, но пружина возвращает ее, создавая колебательные движения.
Решение
1. Подготовим сцену, содержащую две сферы и объект Solver Object (рис. 10.78).

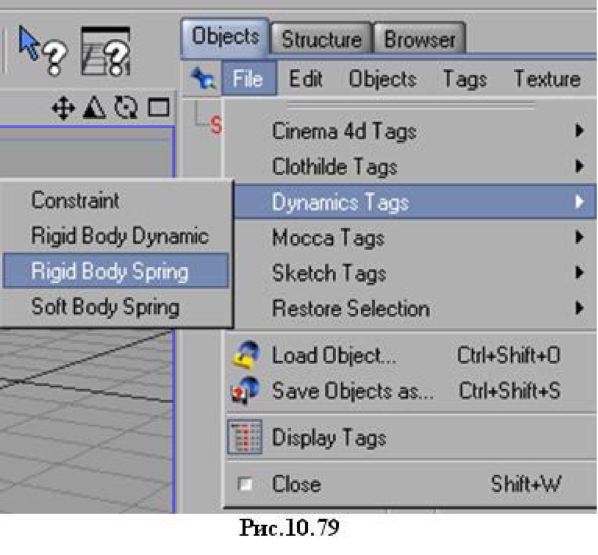
2. Присвоим Solver Object тэг Rigid Body Spring Tag
(меню окна менеджера объектов File (рис. 10.79) или контекстное меню объекта Solver Object).
3. В результате появится диалоговое окно Rigid Spring (рис. 10.80), используемое для создания пружин.
Щелчок по кнопке Add создает одну пружину. Пружины снабжаются порядковыми номерами, начиная с номера 0 (рис. 10.81). Можно задать имя пружине в поле Name. Перетащите левой кнопкой мыши имена сфер из окна менеджера объектов в поля A и B диалогового окна Rigid Spring. Как только вы это сделаете, в окне проекций между сферами появится пружина красного цвета (рис. 10.81).
В полях справа от имен сфер указаны цифры, определяющие точку крепления пружины к объекту.