- перемещение дочернего объекта в иерархии вызывает соответствующее перемещение родительских объектов. Для реализации обратной кинематики служит инструмент Inverse Kinematics.
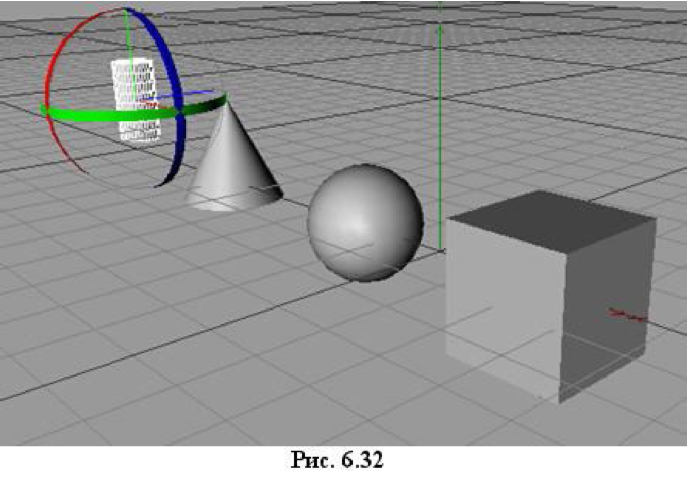
Выделите Cylinder - самый младший (нижний) объект в иерархии (рис. 6.32) и активизируйте инструмент Inverse Kinematics. На объекте Cylinder появится общий значок инструментов перемещения и вращения (рис. 6.32).
Перемещайте цилиндр. Остальные объекты, хотя и находятся на более высоких уровнях иерархии, будут следовать за ним. Программа просчитывает расстояние
семяныч.ру официальный сайт статьи.
между объектами и поддерживает его постоянным с тем, чтобы иерархическая цепочка не распалась.
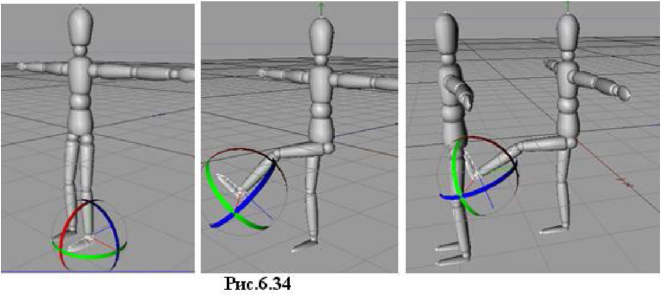
Можно поэкспериментировать на примитиве Figure (не забудьте предварительно перевести его в полигональное состояние), перемещая стопу манекена при включенном инструменте Inverse Kinematics (рис.
6.34). В качестве цели для движения ноги первого манекена можете добавить второй манекен.
Более подробно тема инверсной кинематики рассмотрена в главе, посвященной модулю МОССА.
6.1.20. Инструмент Animation
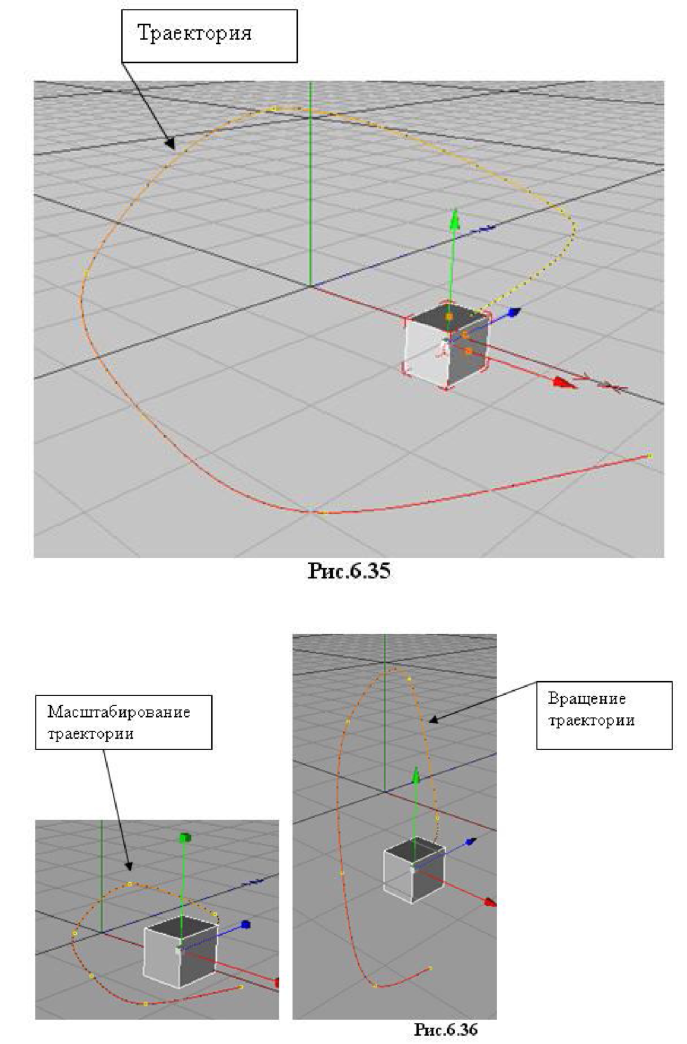
Позволяет менять форму траектории, по которой движется анимируемый объект.
Создадим анимацию для примитива Cube (рис. 6.35).
Вызовем инструмент Animation. Теперь можно, кроме перемещения отдельных точек траектории, модифицировать траекторию целиком: перемещать, масштабировать и вращать.
6.1.21. Инструменты XAxis/Heading,
YAxis/Pitch, ZAxis/Bank
Позволяют заблокировать перемещение объекта по соответствующим осям. Например, создав примитив Cube и выбрав инструмент Move, можно отключить оси 0Y и 0Z (не выбрав эти значки либо в меню Tools, либо на верхней горизонтальной панели инструментов), а активной оставив только ось 0Х. Теперь при передвижении курсора по свободному пространству окна проекций перемещение объекта Cube будет происходить только в направлении оси 0Х.
6.1.22. Инструмент Coordinate System
Позволяет переключаться между локальной и глобальной системами координат.
Для каждого инструмента запоминается система координат, в которой инструмент был применен. Например, перемещение объекта инструментом Move было произведено в глобальной системе координат. Потом вы перешли в локальную систему координат и сделали масштабирование. Затем снова вызвали инструмент Move. В этот момент Cinema 4D автоматически перейдет в локальную систему координат с которой было связано последнее применение инструмента Move.
Для вращения объектов используется система координат НРВ. Система XYZ чувствительна к последовательности, в которой производятся вращения объекта вокруг осей, так как в ней применяются линейные единицы измерения, например, метры. Так, результат анимации вращения объекта вначале вокруг оси 0Х, а затем вокруг оси 0Y может не таким, как если вначале вращение было вокруг оси 0Y, а затем вокруг оси 0Х. Система НРВ не чувствительная к подобным вещам, так как для измерения в ней применяются градусы. При выполнении операции вращения объектов Cinema 4D всегда работает в системе НРВ - это видно в окне менеджера атрибутов для параметра R (рис. 6.37).