Эти методы различаются по следующим основным параметрам:
способу представления объектов;
способу визуализации сцены;
пространству, в котором проводится анализ видимости;
виду получаемого результата (его точности).
В качестве возможных способов лредставления объектов могут выступать аналитические (явные и неявные), параметрические и полигональные.
Далее будем считать, что все объекты представлены набором выпуклых плоских граней, например треугольников (полигональный способ), которые могут пересекаться одна с другой только вдоль ребер.
МАЮШФП
10. Удаление невидимых линий и поверхностей Координаты в исходном трехмерном пространстве будем обозначать через (х, у, г), а координаты в картинной плоскости - через (X, У). Будем также считать, что на картинной плоскости задана целочисленная растровая решетка - множество точек (/, у), где / и / - целые числа.
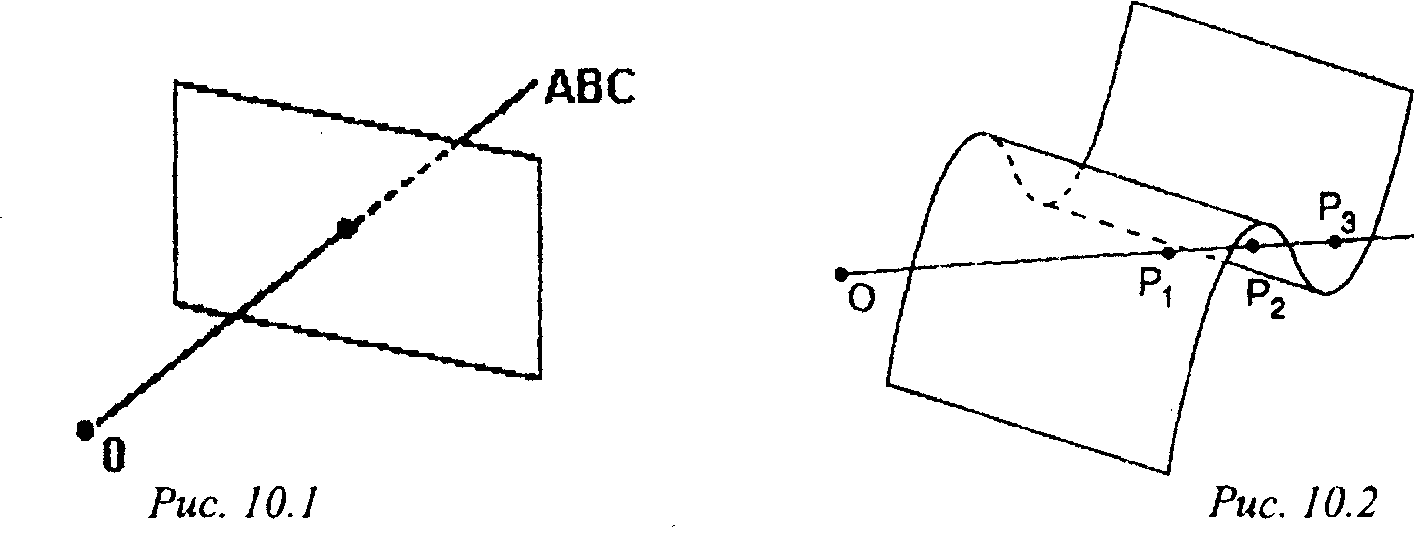
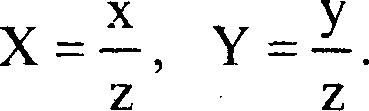
Если это не оговорено особо, будем считать для простоты, что проектирование осуществляется на плоскость Оху. Проектирование при этом происходит либо параллельно оси Ог, т. е. задается формулами Х = х, У=у, либо является центральным с центром, расположенным на оси Ог, и задается формулами
Существуют два различных способа изображения трехмерных тел - каркасное (wireframe - рисуются только ребра) и сплошное (рисуются закрашенные грани). Тем самым возникают два типа задач - удаление невидимых линий (ребер для каркасных изображений) и удаление невидимых поверхностей (граней для сплошных изображений).
Анализ видимости объектов можно производить как в исходном трехмерном пространстве, так и на картинной плоскости. Это приводит к разделению методов на два класса:
» методы, работающие непосредственно в пространстве самих объектов; методы, работающие в пространстве картинной плоскости, т. е. работающие с проекциями объектов.
Получаемый результат представляет собой либо набор видимых областей или отрезков, заданных с машинной точностью (имеет непрерывный вид), либо информацию о ближайшем объекте для каждого пиксела экрана (имеет дискретный вид).