КИНЕМАТИКА И ДИНАМИКА
Ашм ационные последовательности можно построить, используя кинематические или динамические описания. При кинематическом описании, чтобы задать анимацию, указываются параметры движения (положение, скорость и ускорение) безотносительно причин или целей движения. При постоянной скорости (нулевое ускорение) движение твердых тел на сцене указывается заданием исходного положения и вектора скорости для каждого объекта. Приведем пример: если скорость задана как (3, 0, -4) км/с, тогда этот вектор дает направление прямолинейного движения, а модуль вектора скорости равен 5 км/с. Если, кроме того, задать ускорение (скорость изме
1017
нения скорости), можно получить ускоренные, замедленные и криволинейные траектории движения. Кинематические спецификации движения можно задавать простым описанием траектории движения. Для этого часто используются сплайновые кривые.
Аь тернативный подход - использование обратной кинематики. Здесь задаются исходные и конечные положения объектов в различные моменты времени, и система рассчитывает параметры движения. Предположим, что ускорение равно нулю, и определим постоянную скорость, благодаря которой объект перейдет из исходного положения в конечное. Данный метод часто используется при обработке сложных объектов: указывается положение и ориентация конечного узла (вершины) объекта, например, кисти руки или ступни ноги. Далее система определяет параметры движения других вершин, чтобы имитировать нужное движение.
С другой стороны, динамические описания требуют задать силы, приводящие к появлению скорости и ускорения. Описание поведения объекта через влияние сил обычно называется физическим моделированием (см. главу 8). В качестве сил, влияющих на движение объектов, могут использоваться электромагнитные, гравитационные силы, силы трения и другие механические силы.
В число приложений физически обоснованного моделирования входит описание сложных жестких и нежестких систем, таких как одежда и пластические материалы. Обычно для получения параметров движения из динамических уравнений с использованием начальных условий или краевых значений применяются численные методы.
АНИМАЦИЯ ШАРНИРНОЙ ФИГУРЫ
Стандартной техникой анимации людей, животных, насекомых и других существ является их моделирование в форме шарнирных фигур - иерархических структур, составленных из набора жестких соединений, связанных шарнирами (рис. 13.19). В
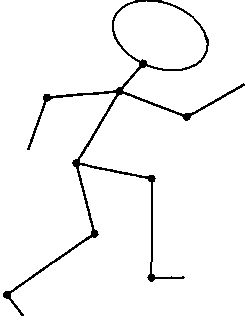
Рис. 13.19. Простая шарнирная фигура с девятью соединениями и двенадцатью соединяющимися частями, не считая овальной головы
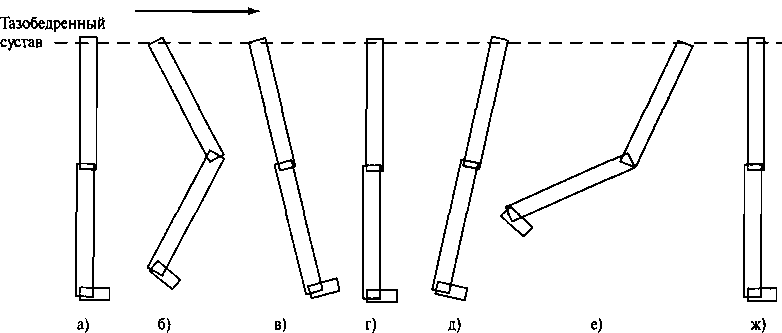
Рис. 13.20. Возможные движения набора связанных частей, представляющие ногу при ходьбе менее формальном изложении это всего лишь означает, что анимируемые объекты моделируются как движущиеся фигуры из брусков, или упрощенные скелеты, на которые позднее можно натянуть поверхности, представляющие кожу, волосы, мех, перья, одежду или другие внешние оболочки.
Точки соединения, или шарниры, фигуры размещаются в плечах, бедрах, коленях и других суставах. При движении тела эти точки перемещаются по заданным траекториям движения. Например, если задано движение объекта, плечо автоматически движется определенным образом, а при перемещении плеча движется рука. Своеобразные движения шарниров и соединенных частей определяются при конкретных типах движения (ходьба, бег, прыжки).