Эту модель можно представить в виде таблицы, в частности такой, как изображена на рис. 8.3. При заполнении таблицы предполагается, что каждый символ имеет уникальный идентификатор. Такая технология моделирования не несет информацию о взаимных связях между объектами, но той информации, которая включена в таблицу, вполне достаточно для того, чтобы сформировать изображение всей совокупности объектов. Модель позволяет отыскать любой объект и изменить параметры преобразований, заданных для этого объекта, удалить из модели объект или добавить новый. Но отсутствие в модели связей между объектами ограничивает возможности работы с ней.
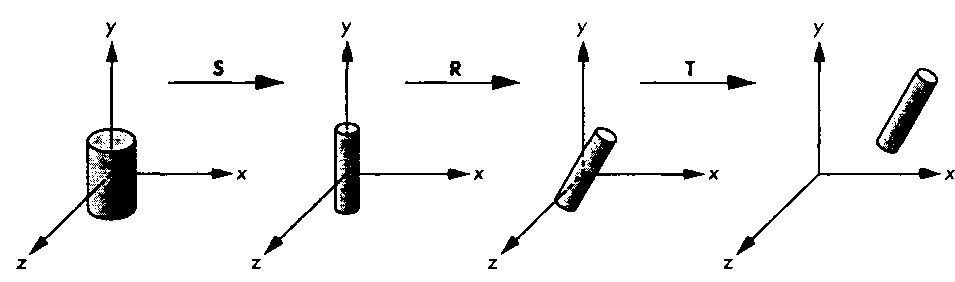
Рис 8.2. Преобразования экземпляра
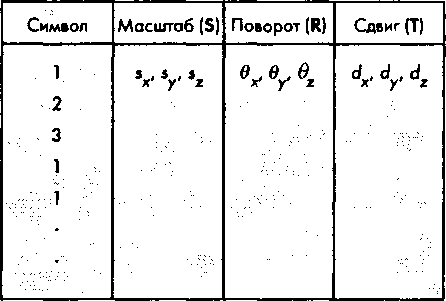
Рис 8.3. Таблица параметров преобразований символов
8.2. Иерархические модели Предположим, что перед нами стоит задача сформировать модель автомобиля, которую затем можно было бы использовать в программе анимации. Такую модель можно составить из пяти компонентов - кузова и четырех колес (рис. 8.4), - каждый из которых, в свою очередь, состоит из примитивов графической системы. Два кадра анимации этой модели показаны на рис. 8.5. В программе, которая будет формировать такие кадры мультфильма, нужно учитывать, что при повороте колеса на 360° автомобиль смещается на расстояние 2яг, где г- радиус колеса. В состав программы должна входить функция, которая будет формиро8.2. Иерархические модели вать колесо, и функция, которая будет формировать кузов. Обеим функциям передается информация о скорости и направлении движения модели. На языке псевдокода программа должна выглядеть примерно так"opengl5_370.html">⇐ Предыдущая| |Следующая ⇒