11.1.1. Параметрические кривые как траектории Важным применением параметрического задания кривых является описание пути, который объект проходит, перемещаясь во времени. Например, при проектировании анимации траекторию полета камеры по сцене необходимо определять в каждый момент Времени. На рис. 11.1 показана камера, движущаяся по сцене; в момент времени t она расположена в точке P(t). Дизайнер выбирает подходящую функцию P(t) так, чтобы камера двигалась желаемым образом, например делая снимок № 1 при t = 0,1, снимок № 2 - при t - 0,2 и т. д. Направление взгляда камеры также должно быть определено в каждый момент времени.
Кроме задания определенных координат камеры в определенные моменты времени дизайнер должен обеспечить плавное движение камеры в соответствии с функцией P(t) без каких-либо резких толчков, которые могут проявиться при воспроизведении анимации. Такое условие накладывает определенные ограничения на скорость Р'(£). которые мы рассмотрим ниже.
Другие объекты также могут двигаться во время анимации: по дороге может ехать автомобиль (см. рис. 11.1.), на пруду может изменить курс лодка, а из дома может выйти человек. Как уже обсуждалось в главе 5, ноги и руки человека также могут совершать свои собственные движения. Движение каждого из этих объектов может быть описано путем задания подходящих параметрических функций F(t), С(г)ит.д.
11.1. Введение
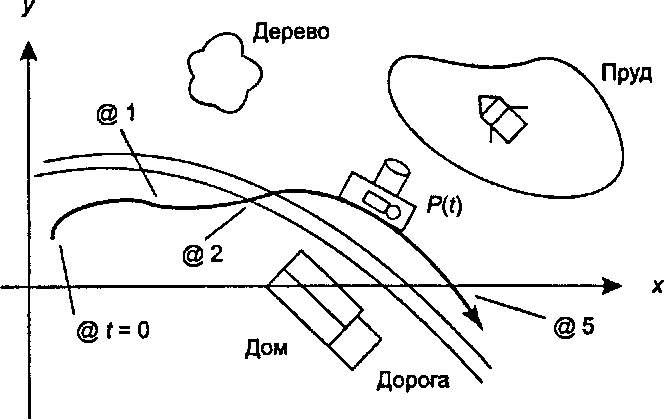
Рис. 11.1. Задание пути камеры при анимации Анимации обычно происходят в трехмерном мире, поэтому камера, разумеется, также движется вдоль ЗО-траектории P(t) - (x(t), y(t), z(t)), а каждый снимок формируется путем проецирования сцены на пленку в камере.
11.1.2. Плавность движения Предположим, что параметр t означает отрезок времени, а точка P(t) движется по кривой по мере роста с. Естественно поинтересоваться скоростью функции P(f) вдоль кривой в каждый момент времени. Вектор скорости (velocity) v(t) - это вектор, описывающий скорость и направление функции P(t) при ее прохождении по кривой. Скорость задается формулой"opengl1_756.html">⇐ Предыдущая| |Следующая ⇒